



近日,振華重工自行研制的水下機器人系統(ROV系統)圓滿完成了施工作業任務,標志著公司擁有自主知識產權的水下機器人系統正式商用。

本次施工作業位于我國海域,從2019年6月底開始,共歷時一個月。ROV系統作為作業母船的關鍵支持設備,在本次作業任務中發揮了重要作用,整套系統功能齊備、性能可靠、操作方便,協助作業母船順利完成了既定的作業任務。
按照作業界面,海洋工程施工作業可分為水上作業與水下作業兩類。其中,針對水上作業的裝備,主要以浮式起重船、鋪管(纜)船、鉆井平臺、風電安裝平臺等工程船為主,用以完成水面以上的作業施工。水下作業主要任務包含:水下搜索、監視、勘探、焊接、挖溝、填埋、采集以及鉆探等。
該類任務的共性特點為:水下作業時間長、作業環境較惡劣、對作業質量要求較高。因此,作業型水下機器人的研發勢在必行。由于該型機器人采用母船供電的方式,具有很強的動力,無能量儲備問題,可長時間、重載、高強度的在水下執行各種作業任務。與人工水下作業相比,振華重工研制的水下機器人作業能夠提高作業效率、降低作業風險和施工成本。

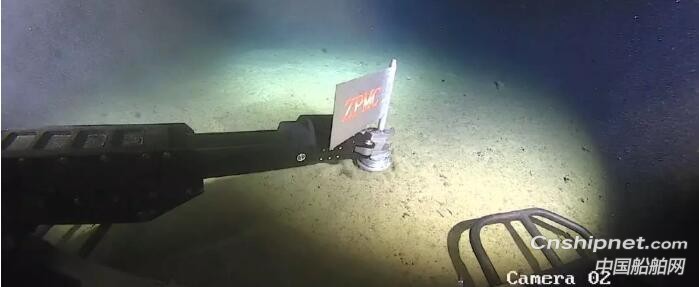
振華重工研制的水下機器人系統包含ROV本體、LARS系統、水面控制站以及作業支持系統,系統完整,支持擴展。此次下水作業的機器人,額定水下輸出功率為200馬力,適用水深4000米,配套了多種導航、照明、攝像與傳感器裝置,可以搭載多型機械手,還可以依據作業特點,加掛特種作業底盤。
同時,機器人可以搭配中繼器使用,也可以單獨使用,應用范圍很廣,尤其適用于海工作業。另外,振華重工研制的LARS系統采用了便攜式設計方案,可以靈活布置于各類作業母船。系統具備主動波浪補償、恒張力、止蕩等功能,可在4級海況下安全、可靠、穩定的完成機器人釋放與回收任務,具備在惡劣海況作業的能力。
